Department of Mechanical Engineering, Boston University
Summer rotation project in the Soft Robotics Control Lab. Work still in progress, hoping to write a paper on it!
Optimization, fabrication and validation of three-section planar continuum robot for ureteroscopy
Click to expand
Advisor: Professor Nobuhiko Hata
Department of Radiology, Brigham and Women's Hospital | Harvard Medical School
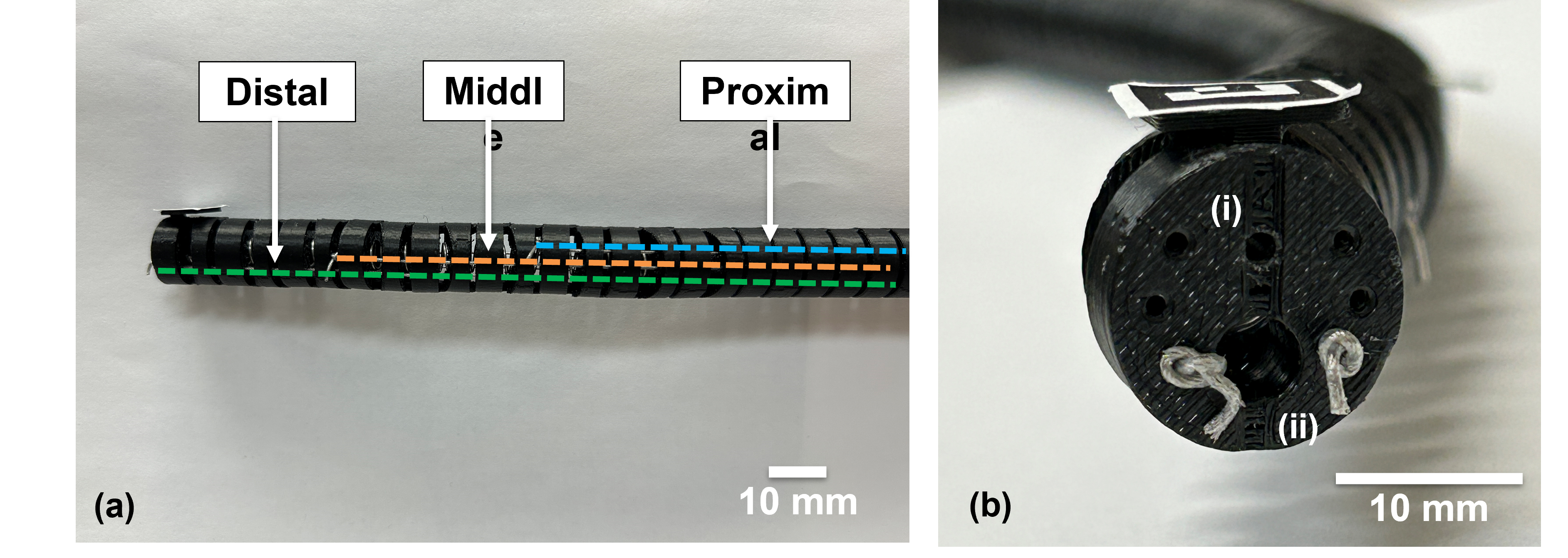
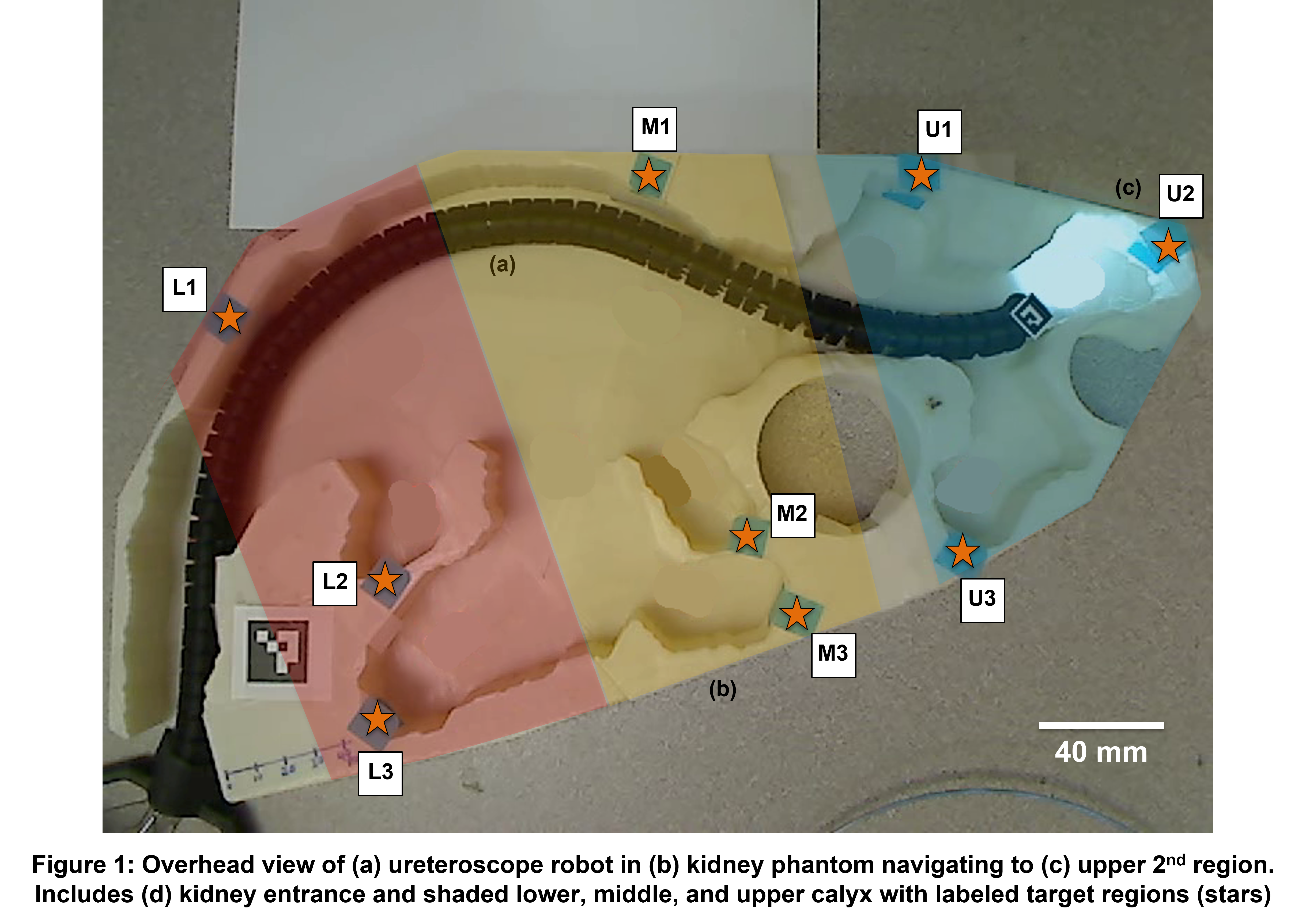
Winter rotation project in the Surgical Navigation and Robotics (SNR) Lab at Brigham and Women's Hospital. Developed prototype planar tendon-actuated ureteroscope, based on previous student work in optimization for ureteroscope range of motion in the kidney. The 3x scale robot has three actuated sections of equal length, actuated using three servo motors. The ureteroscope also features a working channel (for surgical tools) as well as a channel for a chip-on-tip camera. Fabricated device and performed preliminary validation of design, identifying performance metrics and areas for future work.
Department of Mechanical Engineering, Boston University
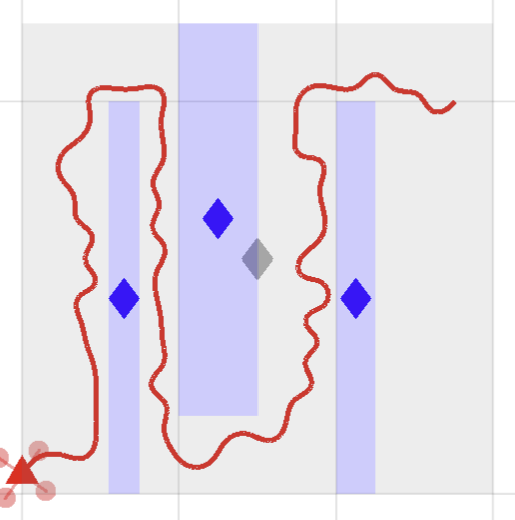
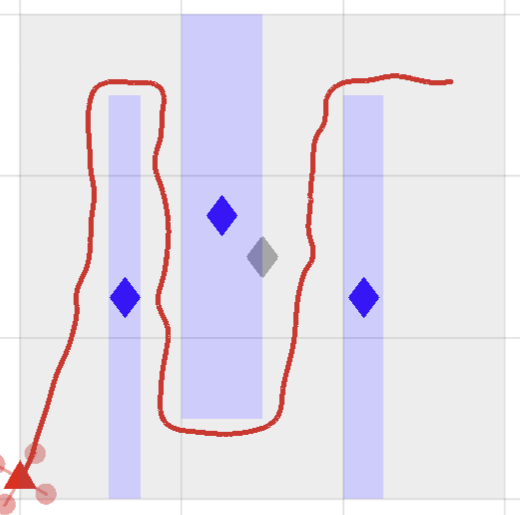
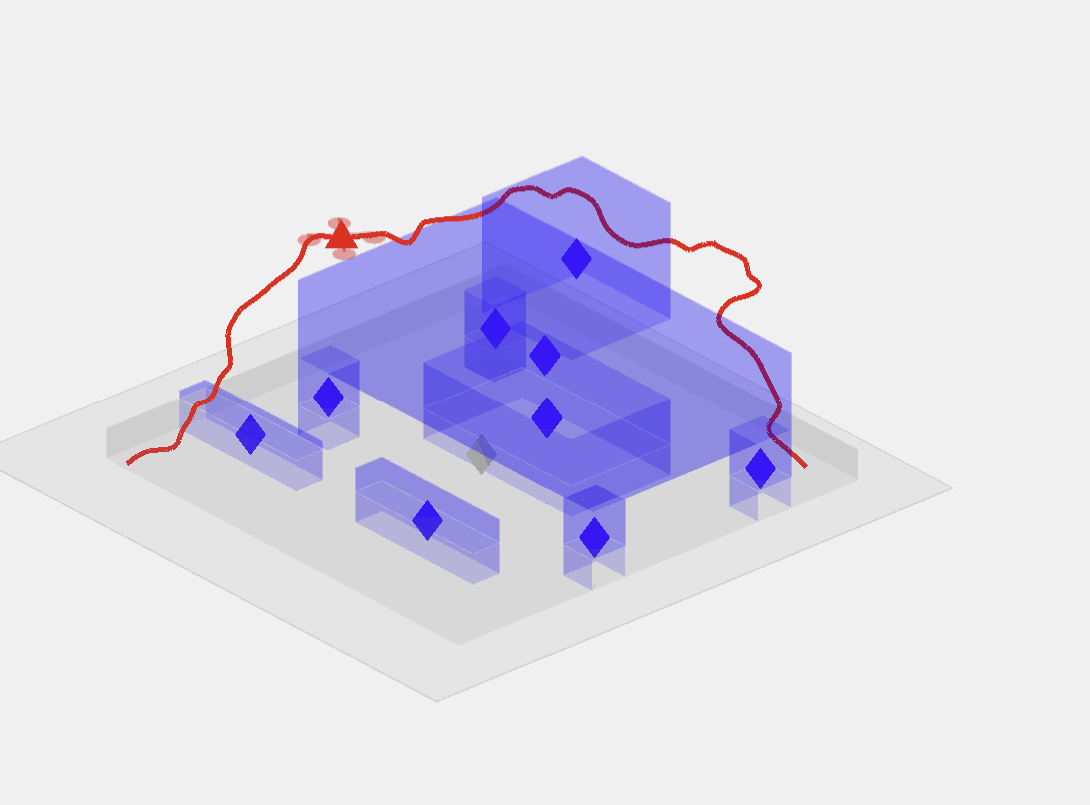
Final project for ME570: Robot Motion Planning. We implemented 2D and 3D RRT and RRT* algorithms and applied them in simulation. The performance results were then compared to pre-built optimized algorithms from the MATLAB/Simulink UAV Toolbox.
2D RRT simulation
2D RRT* simulation
3D RRT simulation
2021:
MRes Thesis: Soft robot actuator with integrated shape sensing via electrical impedance tomography (EIT)
Supervisors: Drs. James Avery, Mark Runciman, Saina Akhond, George Mylonas
The Hamlyn Centre, Imperial College London
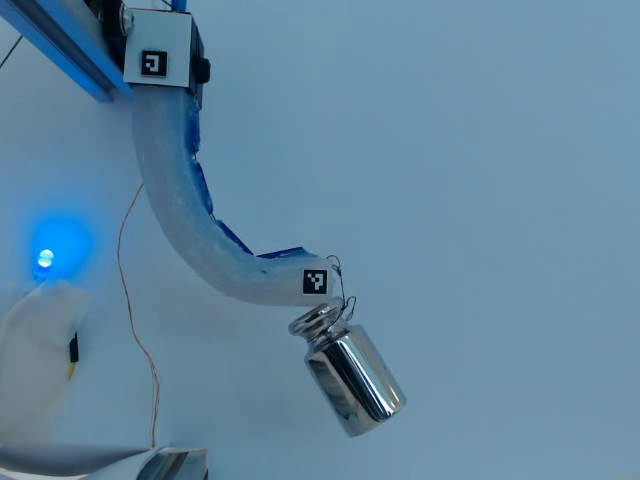
This project entailed an extensive literature review in the field of soft robots, control systems, and uses of EIT in robotics. Next, simulations using EIT simulation software EIDORS were done to evaluate optimal placement of electrodes necessary for sensing along the body of the hypothetical robotic actuator. In tandem, multiple iterations of actuators were devised and tested, starting from 3D-printed actuators operated by hydraulics to silicone moulded cable-driven actuation. The latter was retained and outfitted with a sensing chamber filled with saline solution, this being the site of sensor data production.
Soft robot actuator with 100g weight
2020:
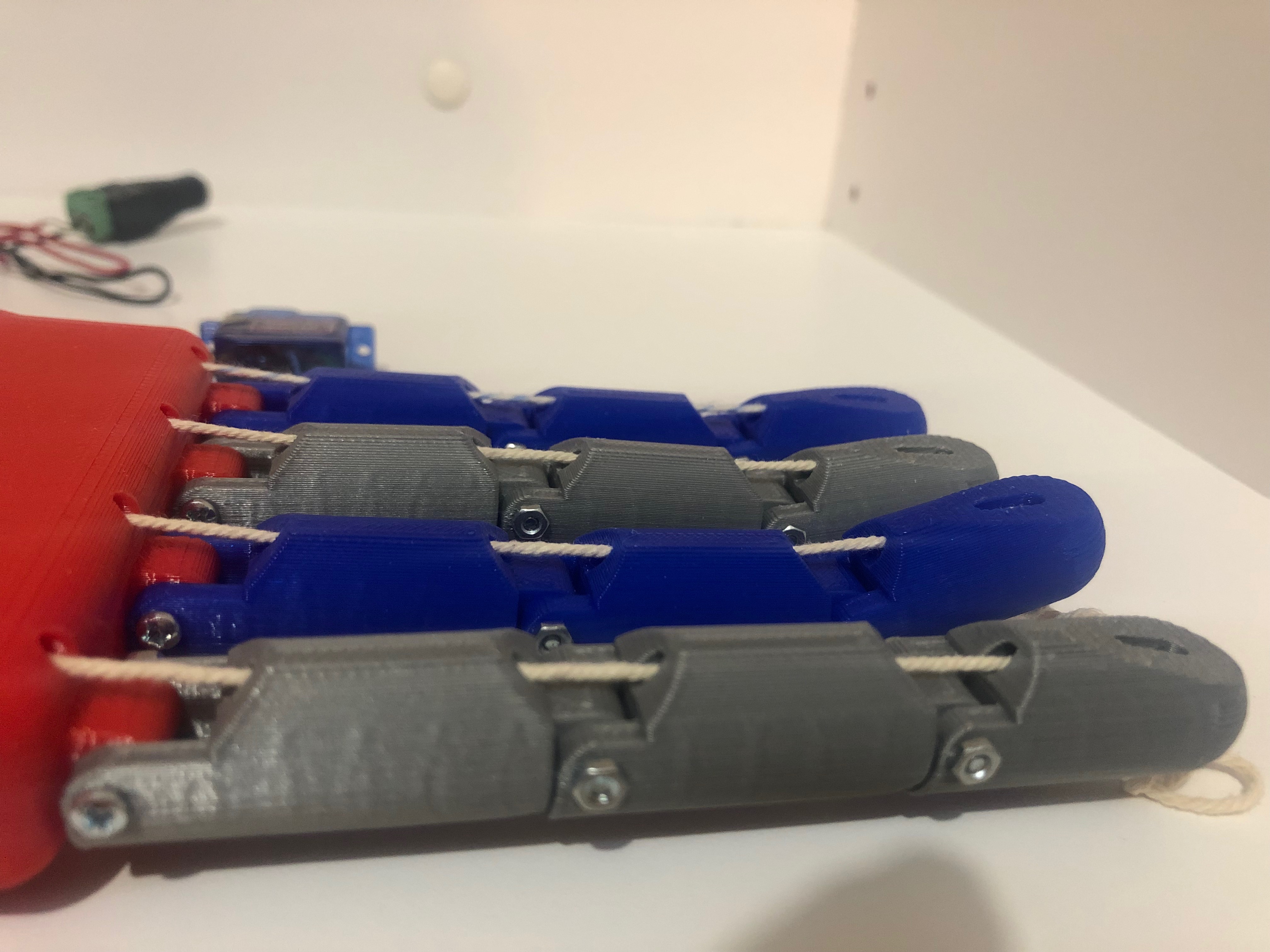
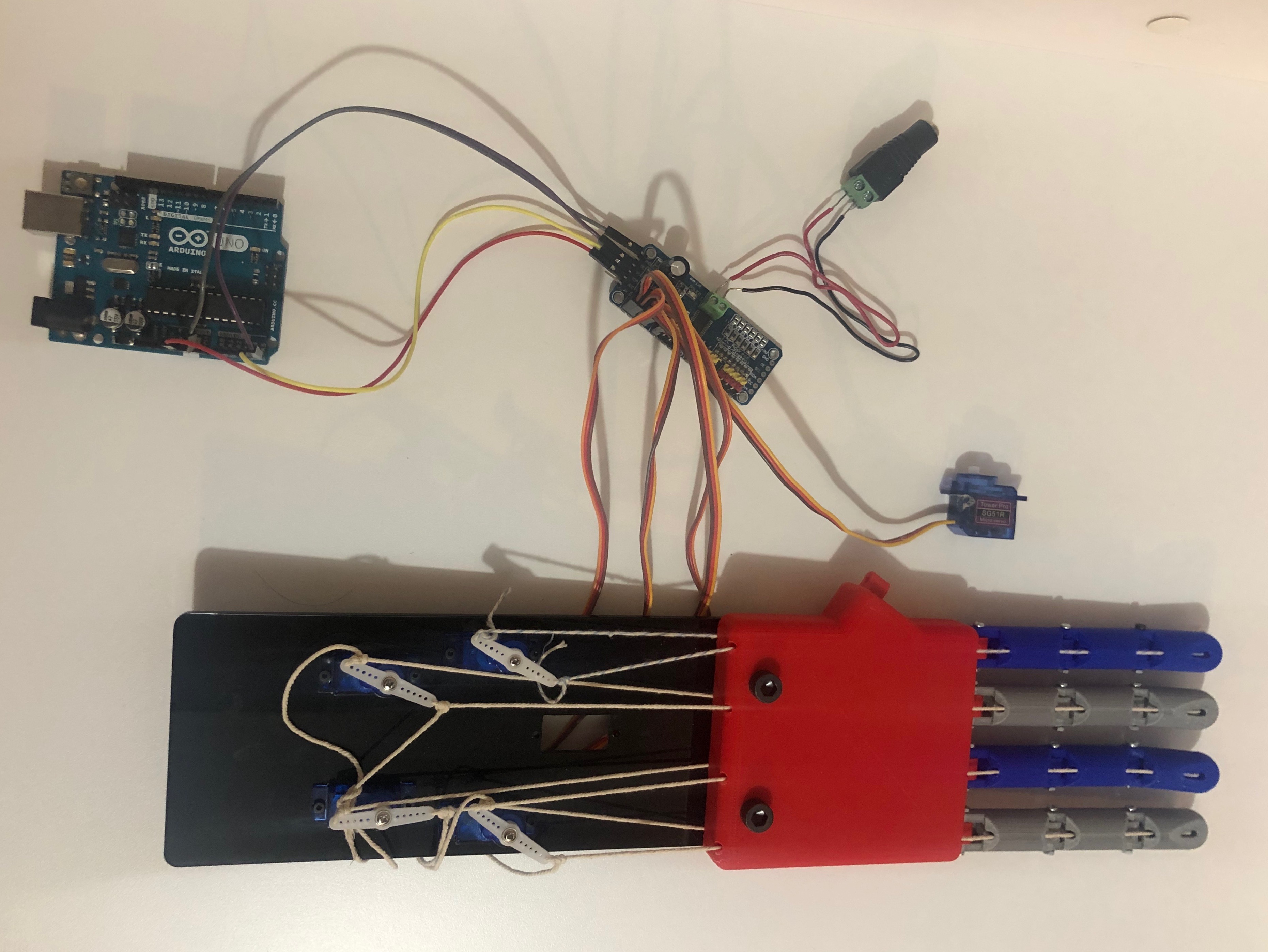
Independent study: 3D-printed anthropomorphic hand integrated with ROS middleware
Independent work to design, fabricate, and program a 3D-printed cable-driven 5-fingered robotic hand.
The hand is then controlled using an Arduino Uno operating as a ROS Serial node, capable of sending/receiving joint commands over a serial connection.
This ROS node can be integrated into any ROS-based project where a fingered manipulator is desired. Given more time, this robot hand design and code would have been refined and tested using a UR5 robot arm for simple pick-and-place experiments.
Close-up view of robot fingers
Robot hand with servo electronics
Ising Model: Coursework for Computational Physics elective
Department of Physics and Astronomy, Tufts University
Completed in a team of three, we developed and implemented a discrete computational model of ferromagnetism initially formulated by Ernst Ising and Wilhelm Lenz. Written in Python (Jupyter Notebook), the work provided shows a simple 2D lattice simulation. Additionally, I built a simple example of a Hopfield network, a computational model representing how neurons learn and store information; a model of biological memory. This network functions in a similar way to the Ising model whereby each individual element in the models have neighbor interaction.
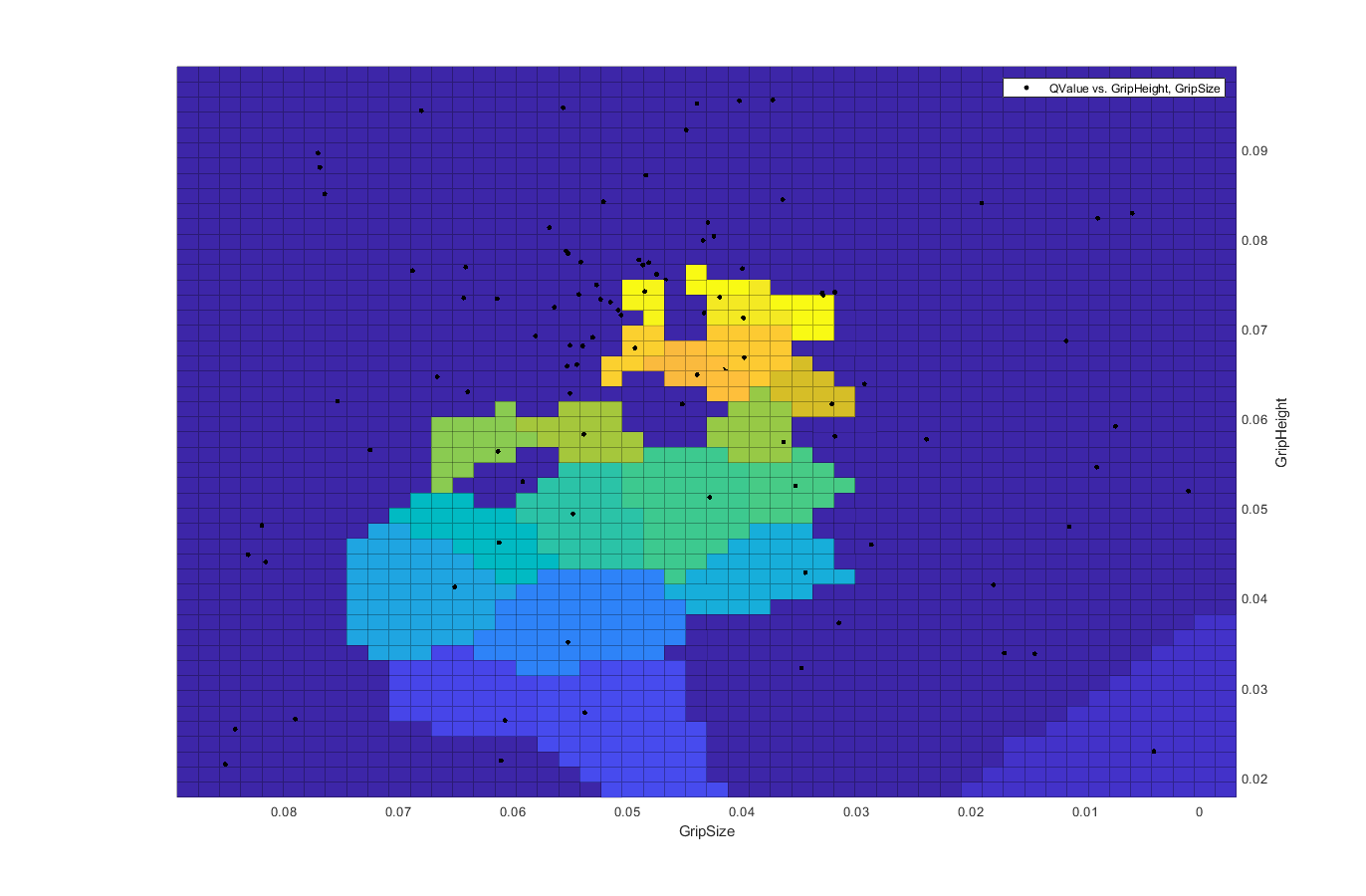
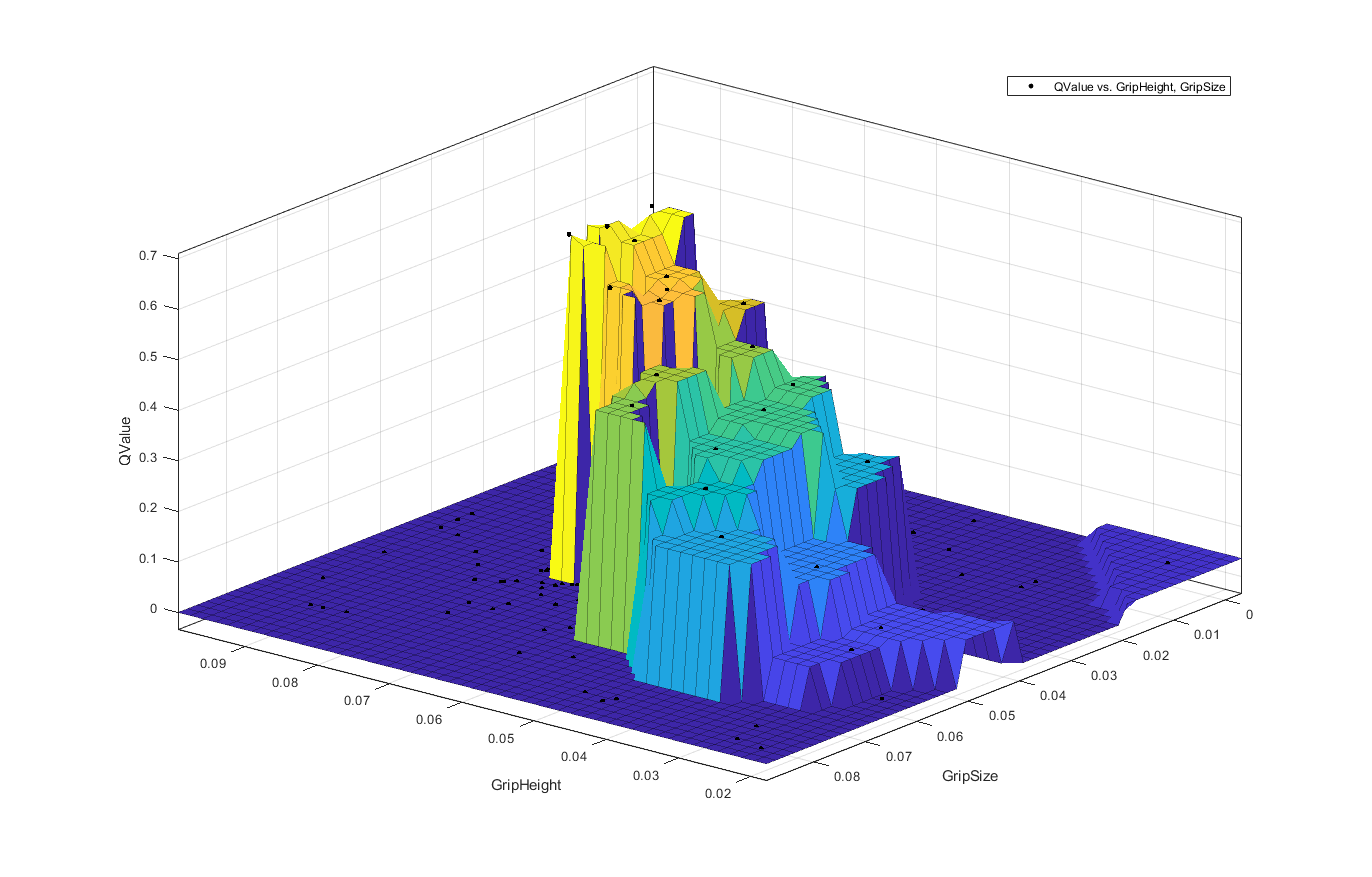
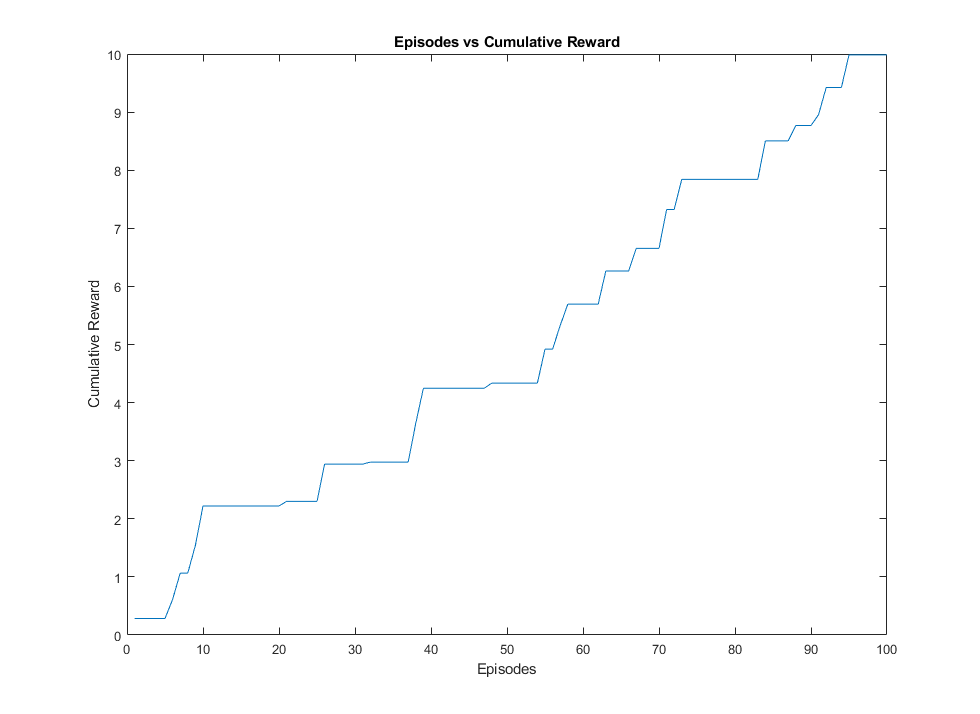
This project was the final assessment in the COMP 150: Reinforcement Learning (RL) elective. My project group and I developed a learning agent with a Multi-Armed Bandit (MAB) learning
scheme to learn the optimal gripper configuration to pick up objects. Time constraints meant we were only able to test our agent on a tennis ball in our experimental setup. In order to
enable satisfactory exploration of the action space, we made the probability of choosing exploration very high. To add additional exploration on top of this, we incorporated a mutation function
which changes the currently found max value, to exaggerate the difference between the currently chosen best action and others of the same value but different location in the action space.
2D plot of Q values in action space
3D plot of Q values in action space
Cumulative reward over 100 episodes
Robot with compliant gripper over goal
Experiment in progress
2014:
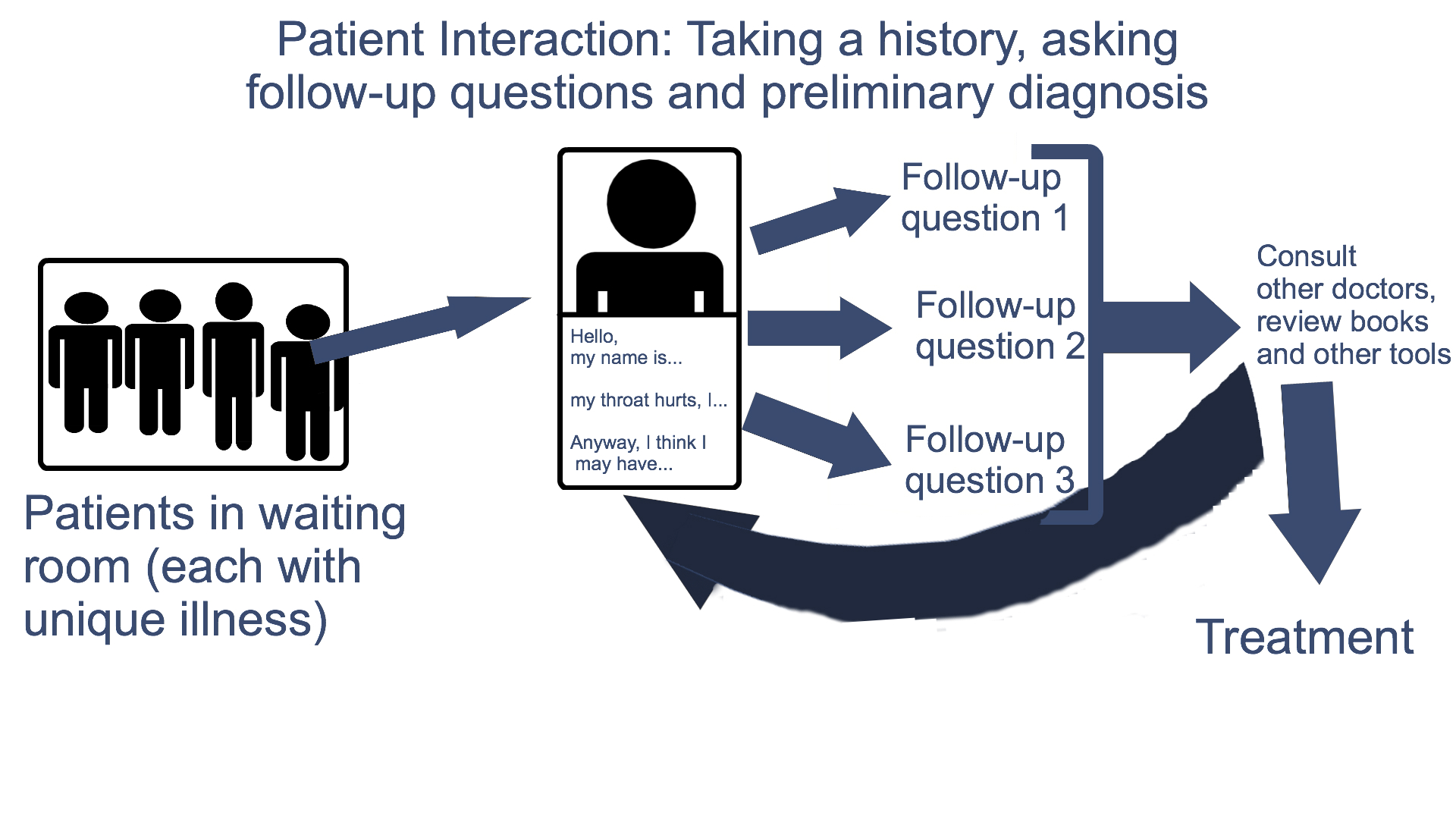
Hospital Simulator: Visual novel video game simulating doctor's diagnosis and patient care experience in a hospital setting.
Click to expand
NuVu Studio, Cambridge, MA
This two-week project was completed for a prompt "Medicine of the Future". Inspired by visual novel and choose-your-own-adventure games, the game is meant to provide an interactive experience of being a healthcare provider in a medicical setting. The choice of pixel graphics was to simplify artistic requirements and to evoke the aesthetics of "retro" or arcade games. Future development of this game include expanding the medical knowledge and diagnoses available, and incorporation of additional medical scenarios to touch on the breadth of the medical field. Literary or other background reviews of existing medical/hospital simulation programs would be investigated as well, to uncover areas of novelty where this simulation project may be steered.